Transformer 原理(四):砖与瓦 —— Residual、LayerNorm、FFN 与 Decoder-only 架构
Transformer 系列第四篇。拆解每层 Encoder/Decoder 内部的关键组件:残差连接如何让深层网络可训练、LayerNorm 为什么选择层而非批、FFN 的隐藏维度为什么是 4 倍、Causal Mask 如何防止作弊,以及 Decoder-only 架构为什么成为大模型的主流选择。
这是 Transformer 原理系列的第四篇。前三篇我们拆解了 Self-Attention、Multi-Head Attention 和位置编码——这些是 Transformer 最核心的创新。
本篇聚焦那些看似不起眼、却不可或缺的基础组件——没有它们,Transformer 根本无法训练。
回顾:每层 Encoder 的内部结构
第一篇我们给过这个流程图,现在逐个拆解:
输入向量 ──→ [ Self-Attention ] ──→ Add & Norm ──→ [ FFN ] ──→ Add & Norm ──→ 输出
前三篇已拆解完 本篇重点 本篇重点 本篇重点每层有四个关键组件:
- Self-Attention(已讲)
- 残差连接(Residual Connection) —— “Add” 部分
- 层归一化(Layer Normalization) —— “Norm” 部分
- 前馈网络(Feed-Forward Network, FFN)
残差连接(Residual Connection)
深层网络的训练困境
Transformer 原始论文堆了 6 层 Encoder + 6 层 Decoder = 12 层。现代大模型更夸张——GPT-4 约 120 层,LLaMA 3 70B 有 80 层。
为什么深层网络难训练? 要回答这个问题,必须理解反向传播的链式法则。
梯度回传:链式法则的逐层连乘
梯度(Gradient):训练时告诉模型”参数该往哪个方向调、调多少”的信号。模型通过损失函数衡量”当前输出离正确答案有多远”,然后把这个误差信号从最后一层反向逐层传回每一层——这就是反向传播。
假设网络有 层,每层是一个函数 。前向传播是逐层嵌套:
训练时,我们用一个损失函数 来衡量”模型输出离正确答案有多远”。直觉上可以先理解为:
比如模型预测下一个词是 “cat” 的概率为 0.3,而正确答案就是 “cat”,那么 。如果模型很自信地给出 0.95 的概率,——概率越高,损失越小。(具体公式下一篇展开,这里只需要知道它是一个标量——一个数字,越小越好。)
反向传播的目标就是算出 对每一层参数的梯度,然后沿梯度方向更新参数来减小损失。
现在要算 对第 层输入 的梯度,链式法则告诉我们:
关键在那个连乘 。每经过一层,梯度要乘上那一层的雅可比矩阵(Jacobian) 。经过 层后,梯度被乘了 次。
这个连乘的行为完全取决于每层 Jacobian 的谱范数(最大奇异值) :
何时梯度消失?
当大多数层的 时——每乘一次,梯度就被缩小一点。
假设每层 Jacobian 的谱范数 ≈ 0.9(梯度每层缩小到 90%)
经过 10 层:0.9¹⁰ ≈ 0.35 → 梯度只剩 35%
经过 50 层:0.9⁵⁰ ≈ 0.0052 → 梯度只剩 0.5%
经过 80 层:0.9⁸⁰ ≈ 0.00018 → 梯度几乎为零
→ 前面的层收到的梯度太小,参数几乎不更新
→ 模型的前几层永远学不会,模型等于"瘸腿"训练典型场景:Sigmoid / Tanh 激活函数的导数最大值 < 1(Sigmoid 最大 0.25,Tanh 最大 1.0),加上权重矩阵的缩放效应,很容易让 。这就是早期深层 RNN/CNN 难训练的根本原因。
何时梯度爆炸?
当大多数层的 时——反过来,每乘一次梯度被放大。
假设每层 Jacobian 的谱范数 ≈ 1.1(梯度每层放大到 110%)
经过 10 层:1.1¹⁰ ≈ 2.6 → 还行
经过 50 层:1.1⁵⁰ ≈ 117 → 梯度已经爆了
经过 80 层:1.1⁸⁰ ≈ 2,048 → 梯度上千倍放大
→ 参数更新量巨大,权重一步跳到离谱的值
→ 下一步梯度更大 → 继续跳 → 训练直接 NaN 崩溃典型场景:权重初始化不当(过大)、学习率过高、或者某些层的激活函数在特定区间导数 > 1 时容易触发。RNN 中尤其常见,因为同一个权重矩阵被重复乘了序列长度次。
本质:指数效应
消失和爆炸本质上是同一个问题——连乘的指数效应:
其中 是各层谱范数的几何平均。 → 指数衰减(消失); → 指数增长(爆炸)。只有精确地 时梯度才稳定——但 层网络要保证每层都恰好 几乎不可能。
用传话游戏来比喻:80 个人排成一列传话。如果每个人只能听清 90% 的内容(),到第 80 个人时信息就面目全非了——这是梯度消失。反过来,如果每个人传话时都越来越激动地夸大 10%(),到最后就变成了一个荒诞的故事——这是梯度爆炸。
解决方案:加一条”捷径”
残差连接的思路极其简单——在每一层旁边加一条直通线路,让输入可以”绕过”这一层直接到达输出:
┌───────────────────────┐
│ │
输入 x ──┼──→ [ Self-Attention ] ──→ (+) ──→ 输出
│ ↑
└───────────── 直通 ─────┘
(残差连接)为什么残差连接能解决梯度问题?(数学推导)
有了残差连接后,每层变成 ,其 Jacobian 变成:
那个 (单位矩阵) 就是关键。
现在从第 层回传到第 层的梯度变成:
把这个连乘展开(类似多项式展开),会得到 条路径的加和:
注意第一项是 ——这意味着无论中间发生了什么,总有一条”全部走捷径”的路径让梯度原封不动地直达第 层。其他 条路径是锦上添花。
无残差连接:梯度只有 1 条路径 → 连乘 → 指数衰减/爆炸
L₁ → L₂ → L₃ → ... → L₈₀ (80 次连乘)
有残差连接:梯度有 2⁸⁰ 条路径 → 加和 → 不再是纯连乘
最短路径:直通(跳过所有层,梯度 = 1)
其他路径:经过 1 层、2 层、...、80 层的各种组合
→ 即使"全经过"的路径消失了,"全跳过"的路径保证梯度至少为 1
→ 梯度不会消失!传话游戏 + 微信版:每个人不仅传话给下一个人,还同时发了一条微信给所有后面的人。即使传话内容变了,微信里的原文还在——第 80 个人可以直接翻微信看原话。
残差学习的本质
换一个视角理解。假设某一层的理想输出是 ,传统网络让这一层直接学 。残差连接让这一层只需要学 ,即”输入和理想输出的差异”:
为什么学差异比学全量更容易? 如果某一层什么都不做是最优的(),传统网络要学一个恒等变换(很难),残差网络只需要让 (把所有权重推向零,很容易)。实际中,大多数层只需要做”微调”而非彻底重写,所以残差连接让每一层的学习任务变得更简单。
实际效果
| 配置 | 12 层 Transformer | 80 层 Transformer |
|---|---|---|
| 无残差连接 | 梯度消失,无法收敛 | 完全不可训练 |
| 有残差连接 | 正常训练 | 正常训练 |
残差连接不是 Transformer 发明的——它来自 2015 年的 ResNet(残差网络),由何恺明等人提出,一举解决了 CNN 的深层训练问题,是深度学习历史上最重要的技巧之一。Transformer 直接借鉴了这个设计。
层归一化(Layer Normalization)
为什么需要归一化?
经过 Self-Attention 或 FFN(Feed-Forward Network,前馈网络,后文详述)后,不同维度的数值范围可能差异很大。差异从哪来? 主要三个来源:
- 权重矩阵的列尺度不一:、、 等权重矩阵的每一列对应输出的一个维度。训练过程中,不同列的权重大小自然不同——有的列权重大,输出的那个维度数值就大;有的列权重小,输出就小。
- Attention 的加权求和放大效应:Self-Attention 的输出是 的加权和。如果某个维度上多个 Value 向量的值都较大,加权求和后这个维度会被进一步放大;而另一个维度上 Value 值本来就小,求和后依然小。
- 残差连接的累积:每一层做 ,经过多层后,某些维度可能被反复叠加放大,而另一些维度的贡献被抵消。层数越深,维度间的尺度差异越大。
某个词经过 Attention 后的向量:
[0.001, 52.3, -0.0003, 18.7, ...]
问题:
- 数值范围跨越好几个数量级(0.001 到 52.3)
- 下一层的权重很难同时处理这么大的差异
- 梯度在不同维度上的更新步长差异巨大,训练不稳定归一化的目标:把向量的数值分布标准化到一个统一的范围,让后续层更容易处理。
LayerNorm 的计算
对一个向量 ,LayerNorm 做三步:
第一步:计算均值
第二步:计算方差
第三步:归一化 + 可学习的缩放和偏移
其中:
- (缩放)和 (偏移)是可训练参数——让模型自己决定归一化后的最优分布
- (极小值,通常 )防止除以零
具体例子
输入向量 x = [0.001, 52.3, -0.0003, 18.7]
第一步:均值 μ = (0.001 + 52.3 + (-0.0003) + 18.7) / 4 = 17.75
第二步:方差 σ² = ((0.001-17.75)² + (52.3-17.75)² + ...) / 4 ≈ 413.6
标准差 σ ≈ 20.34
第三步:归一化
x₁: (0.001 - 17.75) / 20.34 ≈ -0.87
x₂: (52.3 - 17.75) / 20.34 ≈ 1.70
x₃: (-0.0003 - 17.75) / 20.34 ≈ -0.87
x₄: (18.7 - 17.75) / 20.34 ≈ 0.05
归一化后:[-0.87, 1.70, -0.87, 0.05]
→ 所有值都在合理范围内了!📌 为什么是 LayerNorm 而不是 BatchNorm?
如果你了解 CNN,可能听过 BatchNorm(批归一化)。它在 CNN 中效果极好,为什么 Transformer 不用?
BatchNorm 是跨样本归一化——对一个 batch 中所有句子的同一个位置的同一个维度求均值和方差:
Batch 中有 32 个句子:
BatchNorm 计算:句子₁的第3个词的第5维 + 句子₂的第3个词的第5维 + ... 的均值
问题:
① 句子长度不同 → 第 20 个词在短句中不存在
② batch 太小或推理时 batch=1 → 统计量不稳定
③ 不同位置的词没有可比性(第 1 个词和第 10 个词的分布可能完全不同)LayerNorm 是在单个样本内部归一化——对同一个词的所有维度求均值和方差:
LayerNorm 计算:某个词的 512 维向量内部的均值和方差
优势:
✅ 不依赖 batch 大小(推理时 batch=1 也没问题)
✅ 不依赖序列长度(每个词独立归一化)
✅ 同一个词的不同维度之间具有天然的可比性| 对比 | BatchNorm | LayerNorm |
|---|---|---|
| 归一化方向 | 跨样本(batch 维度) | 跨特征(feature 维度) |
| 依赖 batch 大小 | 是 | 否 |
| 可变长序列 | 处理困难 | 天然支持 |
| 推理时 batch=1 | 需要维护移动平均 | 直接计算 |
| 适用场景 | CNN(固定尺寸输入) | Transformer(可变长序列) |
Pre-Norm vs Post-Norm
原始 Transformer 论文把 LayerNorm 放在残差连接之后(Post-Norm):
Post-Norm(原论文):
x → Self-Attention → x + Attention(x) → LayerNorm → 输出
公式:LayerNorm(x + Sublayer(x))但后来的实践发现,放在之前(Pre-Norm)训练更稳定:
Pre-Norm(现代主流):
x → LayerNorm → Self-Attention → x + Attention(LN(x)) → 输出
公式:x + Sublayer(LayerNorm(x))为什么 Pre-Norm 更好? Post-Norm 中,残差连接的结果先经过了 Attention 变换,数值可能已经不稳定了,此时再归一化是”事后补救”。Pre-Norm 在进入 Attention 之前就归一化好了,确保输入始终在合理范围内,训练更稳定。GPT、LLaMA 等现代大模型都采用 Pre-Norm。
前馈网络(FFN)
角色:信息的”消化吸收”
在每层 Encoder/Decoder 中,Self-Attention 负责收集信息(让每个词看到其他词),FFN 负责处理信息(对每个词独立做非线性变换)。
类比:Self-Attention 像开会收集各方意见,FFN 像会后每个人独立消化整理笔记。
结构
FFN 本质上就是两个线性层 + 一个激活函数,对每个词独立应用:
其中:
- :第一层,升维
- :第二层,降维
- :激活函数(原论文用 ReLU,现代模型用 SwiGLU/GELU)
输入 (512维) → 升维 → (2048维) → 激活函数 → 降维 → (512维) → 输出
W₁ σ W₂
"展开分析" "非线性" "压缩总结"为什么 ?
原始论文中 ,,正好 4 倍。
为什么要先升维再降维? 直觉上:
输入 512 维 → 升到 2048 维 → 再降回 512 维
就像做分析:
原始数据(512维)→ 展开成更细的维度(2048维),在更大的空间里做非线性变换
→ 压缩回原始维度(512维),提炼出关键信息升维让模型有更多的”工作空间”来做复杂变换。如果直接在 512 维上操作,表达能力受限。
4 倍不是唯一选择——LLaMA 使用 (约 2.67 倍),因为 SwiGLU 激活函数有三个矩阵,需要调整倍率来保持总参数量不变。
激活函数的进化
为什么需要激活函数? 如果 FFN 只有线性变换(矩阵乘法 + 加偏置),两层线性变换的组合 仍然是一个线性变换——可以合并成单层 ,两层和一层等价,深度毫无意义。激活函数引入非线性,让网络真正具备”深层叠加产生更强表达能力”的可能。
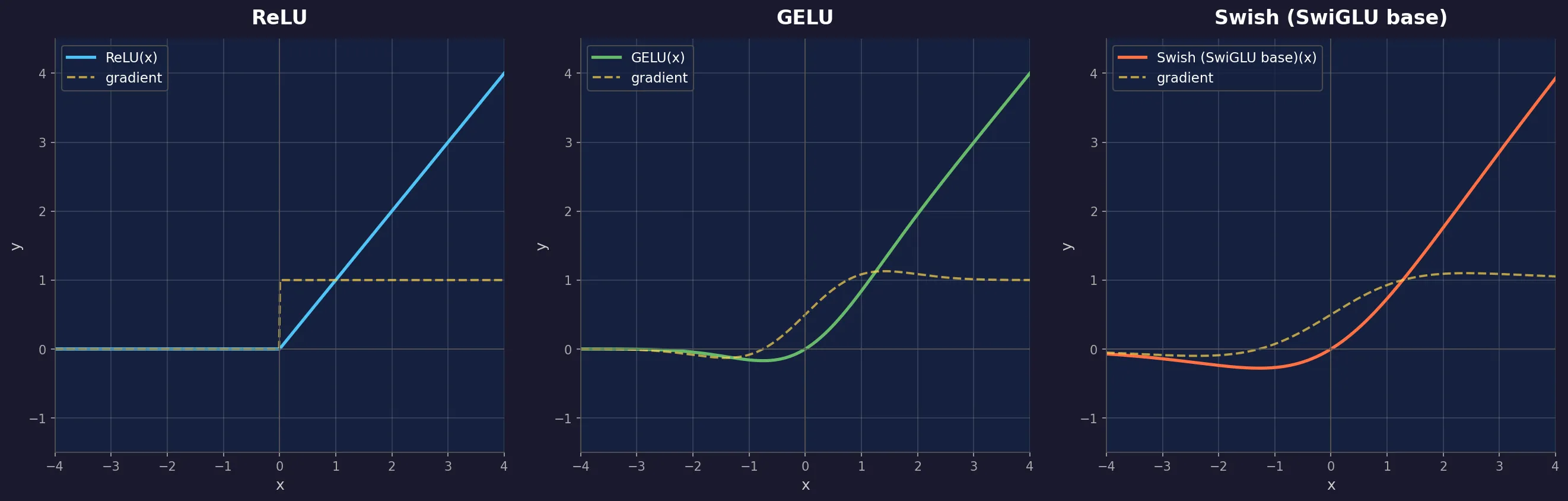
下面是 Transformer 历史上三代激活函数的演进,函数图像和梯度(虚线)如图所示:
ReLU(2012-2017,原始 Transformer 论文)
导数:
x = -2.0 → ReLU(-2.0) = 0 梯度 = 0 ← 完全死了,不更新
x = -0.1 → ReLU(-0.1) = 0 梯度 = 0 ← 也死了
x = 0.5 → ReLU(0.5) = 0.5 梯度 = 1 ← 正常传梯度
x = 3.0 → ReLU(3.0) = 3.0 梯度 = 1 ← 正常优点:计算极快(一个 max 操作),正区间梯度恒为 1,不会梯度消失。
致命缺陷——神经元死亡(Dying ReLU):一旦某个神经元的输入变为负数,输出恒为 0,梯度也恒为 0。这意味着该神经元永远不会再被更新——它”死了”。在大规模训练中,可能有大量神经元陷入死区,模型有效容量严重下降。
从图中可以清楚看到:ReLU 在 处有一个硬拐点,左半边函数值和梯度都是 0——信息在这里被永久丢弃。
GELU(2016,被 GPT / BERT 采用)
其中 是标准正态分布 的累积分布函数(CDF):
的直觉:当 时 ,当 时 ,在 时 。所以 GELU 的行为是:
- 很大时:,(接近恒等,和 ReLU 正区间一样)
- 很小时:,(接近抑制,和 ReLU 负区间一样)
- 在 0 附近时: 在 0 到 1 之间平滑过渡——这就是关键差异
导数:
其中 是标准正态的概率密度函数。
x = -2.0 → GELU(-2.0) ≈ -0.045 梯度 ≈ -0.009 ← 不是零!仍有微小梯度
x = -1.0 → GELU(-1.0) ≈ -0.159 梯度 ≈ 0.083 ← 负区间也有梯度流
x = 0.0 → GELU(0.0) = 0 梯度 = 0.5 ← 平滑过渡
x = 1.0 → GELU(1.0) ≈ 0.841 梯度 ≈ 1.08 ← 接近 ReLU相比 ReLU 的改进:负区间不再”一刀切”为零,而是保留微小的输出和梯度。这意味着:
- 不会神经元死亡——负区间仍然有梯度信号可以回传
- 过渡更平滑—— 附近没有硬拐点,优化损失面更光滑,训练更稳定
实际实现中, 的积分太贵,通常用近似公式:
SwiGLU(2020,被 LLaMA / PaLM / 现代主流采用)
SwiGLU 不是单个激活函数,而是一个带门控的激活机制,由两部分组成:
第一部分——Swish 激活函数:
其中 是 Sigmoid 函数。Swish 的行为和 GELU 非常接近(看图中第三张),但计算上用 Sigmoid 比高斯 CDF 更快。
第二部分——门控机制(GLU, Gated Linear Unit):
其中 是逐元素乘法。注意这里用了两个独立的权重矩阵 和 :
输入 x (512维)
│
├──→ × W₁ → Swish激活 → 得到「值」 (决定每个维度的强度)
│
└──→ × W₃ → 不激活 → 得到「门」 (决定每个维度是否放行)
「值」⊗「门」= 输出 (逐元素相乘)为什么门控有效? 普通激活函数对每个维度独立决定”保留还是抑制”。门控机制让模型可以用一组参数()学习**“什么信息该通过”,用另一组参数()学习”通过的信息是什么”**——分工更明确,表达能力更强。
代价:SwiGLU 需要三个权重矩阵()而不是两个。为了保持总参数量不变,LLaMA 把 从 降到了 (约 2.67 倍)。
三代激活函数对比
| 特性 | ReLU | GELU | SwiGLU |
|---|---|---|---|
| 负区间 | 硬截断为 0 | 平滑抑制,保留微小值 | 平滑抑制 + 门控 |
| 梯度死区 | 有( 梯度恒 0) | 无 | 无 |
| 处 | 不可导(硬拐点) | 平滑 | 平滑 |
| 参数量 | (2 个矩阵) | (2 个矩阵) | (3 个矩阵) |
| 计算量 | 最低 | 中等 | 最高 |
| 实际性能 | 基准 | 优于 ReLU | 最优(同参数量下) |
| 代表模型 | 原始 Transformer | GPT-2, BERT | LLaMA, PaLM, Gemma |
为什么不用最简单的 ReLU? 实验表明,SwiGLU 在同等参数量下性能一致优于 ReLU 和 GELU。门控机制让信息流动更加精细可控,代价是多一个权重矩阵 和略高的计算量——对于现代大模型来说完全值得。
FFN 的参数量
FFN 是 Transformer 中参数量最大的组件。参数都藏在权重矩阵里——我们逐个数:
FFN 的参数(以原始 ReLU 版为例):
回忆 FFN 公式:
矩阵 W₁:把 d_model 维升到 d_ff 维
维度:d_model × d_ff = 512 × 2048
参数量:512 × 2048 = 1,048,576
偏置 b₁:d_ff 维向量
参数量:2048
矩阵 W₂:把 d_ff 维降回 d_model 维
维度:d_ff × d_model = 2048 × 512
参数量:2048 × 512 = 1,048,576
偏置 b₂:d_model 维向量
参数量:512
FFN 总计 ≈ 2 × d_model × d_ff = 2 × 512 × 2048 ≈ 2,097,152
= 8d² (因为 d_ff = 4d)偏置参数量相比矩阵可以忽略(2048 vs 1,048,576),所以通常只算矩阵。
Multi-Head Attention 的参数(第三篇推导过):
W^Q:d_model × d_model = 512 × 512 → 262,144
W^K:d_model × d_model = 512 × 512 → 262,144
W^V:d_model × d_model = 512 × 512 → 262,144
W^O:d_model × d_model = 512 × 512 → 262,144
MHA 总计 = 4 × d_model² = 4 × 512² = 1,048,576 = 4d²对比:
| 组件 | 权重矩阵 | 参数量 | 占比 |
|---|---|---|---|
| Multi-Head Attention | (各 ) | ~33% | |
| FFN | ()+ () | ~67% |
Transformer 的参数大部分在 FFN 里,不在 Attention 里。 Attention 负责”路由”(决定谁看谁),FFN 负责”计算”(实际处理信息)。有研究认为 FFN 扮演了”知识存储”的角色——模型记住的事实知识主要编码在 FFN 的权重矩阵中。
因果掩码(Causal Mask)
为什么 Decoder 需要掩码?
第一篇我们讲过,Decoder 生成输出的方式是自回归——一次生成一个词,然后把生成的词喂回给自己,再生成下一个词。
关键问题:训练时要高效。 如果像推理一样一个词一个词地生成,训练太慢(无法并行)。所以训练时把整个目标序列一次性喂给 Decoder,但必须确保每个位置只能看到它之前的词,不能偷看后面的词。
这就是 Causal Mask(因果掩码)的作用。
工作原理
在计算注意力分数 之后、Softmax 之前,用一个三角掩码把”未来位置”的分数设为 :
,所以 Softmax 之后这些位置的权重变成 0——模型完全看不到未来的词。
目标序列:"I am a student"
Key → "I" "am" "a" "student"
Query ↓
"I" ✅ ✗ ✗ ✗
"am" ✅ ✅ ✗ ✗
"a" ✅ ✅ ✅ ✗
"student" ✅ ✅ ✅ ✅
✅ = 可见(正常注意力分数)
✗ = 被掩码(设为 -∞ → Softmax 后为 0)生成 “a” 时,模型只能看到 “I”、“am”、“a”,看不到 “student”——就像考试时只能看已经答过的题,不能翻到后面偷看。
给了答案,那训练学的到底是什么?
这是一个关键问题。训练时把正确答案直接喂给 Decoder(这种方式叫 Teacher Forcing,“老师强制喂答案”),那模型到底在学什么?
学的是:给定前文,预测下一个词的概率分布。 具体来说:
正确序列:"I am a student"
位置 1:模型看到 "I" → 预测下一个词的概率分布 → 正确答案是 "am"
位置 2:模型看到 "I am" → 预测下一个词的概率分布 → 正确答案是 "a"
位置 3:模型看到 "I am a" → 预测下一个词的概率分布 → 正确答案是 "student"
每个位置都产生一个损失:
L₁ = -log P("am" | "I")
L₂ = -log P("a" | "I am")
L₃ = -log P("student" | "I am a")
总损失 = L₁ + L₂ + L₃模型输出的是整个词表(比如 50,000 个词)上的概率分布。训练的目标是让正确答案对应的概率尽可能高——也就是让损失尽可能小。
那损失信号通过反向传播更新了什么? 更新的是模型里所有的权重矩阵:(Attention 部分)、(FFN 部分)、以及 Embedding 矩阵等。经过海量文本的训练,这些权重矩阵中就编码了语言的统计规律——语法、语义、事实知识、推理能力,全部压缩在这些参数里。
类比:就像一个学生做大量”完形填空”练习。每次给一段话,遮住下一个词,让学生猜。猜对了没奖励,猜错了就纠正。做了几万亿道题之后,学生的”语言直觉”就训练出来了——虽然是靠”给答案”训练的,但学到的是通用的语言能力,不是死记硬背每道题的答案。
掩码矩阵的样子
# 4 个词的因果掩码矩阵
mask = [
[0, -inf, -inf, -inf], # "I" 只能看到自己
[0, 0, -inf, -inf], # "am" 能看到 "I" 和自己
[0, 0, 0, -inf], # "a" 能看到前三个
[0, 0, 0, 0 ], # "student" 能看到所有
]注意:Encoder 中的 Self-Attention 没有 Causal Mask——因为 Encoder 处理的是输入序列,每个词需要看到整个句子(包括后面的词)才能充分理解上下文。只有 Decoder 需要 Causal Mask,因为 Decoder 是在”生成”,不能偷看还没生成的部分。
Decoder-only 架构:为什么它成为大模型的主流?
三种架构回顾
第一篇提到,原始 Transformer 是 Encoder-Decoder 结构。但发展到今天,出现了三种架构变体:
| 架构 | 代表模型 | 适用任务 |
|---|---|---|
| Encoder-only | BERT | 理解型任务(分类、问答、NER) |
| Encoder-Decoder | T5, 原始 Transformer | 序列到序列(翻译、摘要) |
| Decoder-only | GPT, LLaMA, Claude | 生成型任务(对话、写作、推理) |
Encoder-only(BERT)
BERT 只用 Encoder——没有 Decoder,不做自回归生成。它的训练方式是掩码语言模型(MLM, Masked Language Model):随机遮住输入中约 15% 的词,让模型预测被遮住的词。
原始句子: "我 爱 北京 天安门"
训练输入: "我 [MASK] 北京 天安门"
训练目标: 预测 [MASK] 位置 = "爱"关键问题:[MASK] 还参与注意力吗?
参与,而且是全程参与。 具体机制是这样的:
第一步:替换 token,但保留位置。 被选中的词(比如”爱”)在输入中被替换成一个特殊 token [MASK]。[MASK] 在词表中有自己的 embedding 向量(随机初始化,随训练更新),它像一个”占位符”被喂进 Encoder。
第二步:[MASK] 正常参与双向注意力。 Encoder 没有 Causal Mask,是完全双向的——所有位置都能看到所有位置。这意味着:
"我" [MASK] "北京" "天安门"
"我" ✅ ✅ ✅ ✅ ← "我" 可以看到 [MASK]
[MASK] ✅ ✅ ✅ ✅ ← [MASK] 可以看到所有词
"北京" ✅ ✅ ✅ ✅ ← "北京" 也能看到 [MASK]
"天安门" ✅ ✅ ✅ ✅ ← 全双向,没有任何遮挡[MASK] 既被其他词看到(“我”和”北京”的注意力权重中包含 [MASK]),也看到其他所有词([MASK] 的注意力权重分布在”我”、“北京”、“天安门”上)。它通过从周围上下文”收集信息”来推断自己应该是什么词。
第三步:只在 [MASK] 位置做预测。 经过多层 Encoder 后,每个位置都输出一个向量。但损失函数只计算 [MASK] 位置——把该位置的输出向量映射到词表大小的概率分布,与正确答案”爱”算交叉熵损失。
Encoder 输出:
"我" → [向量₁] → 不管(不计算损失)
[MASK] → [向量₂] → 映射到词表 → P("爱") = 0.82 → L = -log(0.82)
"北京" → [向量₃] → 不管
"天安门" → [向量₄] → 不管一个细节——80/10/10 替换策略:
训练时,BERT 先从输入序列的所有词中随机抽 15% 的位置作为”预测目标”。比如一个 20 词的句子,随机选 3 个位置(第 2、7、15 个词)。这 3 个位置的词都要被模型预测,都会计算损失。
但这 3 个位置在输入端的处理方式不同——不是全部替换成
[MASK],而是:
- 80%(约 2.4 个位置) 替换成
[MASK]- 10%(约 0.3 个位置) 替换成词表中的随机词(比如把”北京”换成”香蕉”)
- 10%(约 0.3 个位置) 保持原词不变
为什么不全用
[MASK]?因为推理时(比如做文本分类)输入中不会出现[MASK]这个 token。如果训练时模型只在[MASK]位置做过预测,它就只学会了”看到[MASK]才需要理解上下文”,遇到正常词反而不知道怎么利用上下文了。混入随机词和原词,逼模型对每个位置都认真编码,而不是只关注[MASK]。
特点:每个词可以看到前后所有词(双向注意力)。适合需要理解整个句子的任务(分类、相似度匹配),但不擅长逐词生成。
Encoder-Decoder(T5)
保留完整的 Encoder-Decoder 结构,信息分三步流动:
第一步:Encoder 双向理解输入。 和 BERT 一样,Encoder 是全双向注意力,每个词都能看到输入序列的所有其他词。
第二步:Cross-Attention 把 Encoder 的理解”传递”给 Decoder。 Decoder 的每一层除了 Masked Self-Attention 和 FFN,还多了一个 Cross-Attention 层。在 Cross-Attention 中:
- Query 来自 Decoder(“我想知道什么”)
- Key 和 Value 来自 Encoder 的输出(“输入序列的全部信息”)
以翻译 "我爱北京" → "I love Beijing" 为例:
Encoder(处理输入 "我爱北京"):
"我" ←→ "爱" ←→ "北京" ← 全双向注意力,充分理解输入
↓ Encoder 输出 ↓
Decoder(生成输出 "I love Beijing"):
生成 "I" 时:
Self-Attention:只看到自己(Causal Mask)
Cross-Attention:Q = "I" 的向量
K, V = Encoder 输出的 "我"、"爱"、"北京" 的向量
→ 模型发现 "I" 应该重点关注 "我"
生成 "love" 时:
Self-Attention:看到 "I"、"love"
Cross-Attention:Q = "love" 的向量
K, V = 同样来自 Encoder
→ 模型发现 "love" 应该重点关注 "爱"第三步:Decoder 自回归生成输出。 和 Decoder-only 一样,带 Causal Mask,一次生成一个词。
Encoder-Decoder 每层结构:
Encoder 每层:
输入 → Self-Attention(双向) → Add & Norm → FFN → Add & Norm → 输出
Decoder 每层:
输入 → Masked Self-Attention → Add & Norm
→ Cross-Attention(Q=自己, KV=Encoder输出) → Add & Norm
→ FFN → Add & Norm → 输出T5 的训练方式——Span Corruption(比 BERT 更激进):
原始文本: "The cute dog walks in the park"
输入(Encoder): "The <X> walks <Y> park" ← 用哨兵 token 替换连续片段
目标(Decoder): "<X> cute dog <Y> in the" ← Decoder 生成被遮住的部分和 BERT 的 MLM 不同,T5 遮的是连续片段(span),而且必须由 Decoder 生成出来,不只是分类预测。
适合有明确”输入→输出”映射的任务(翻译、摘要),但结构复杂——Decoder 每层比 Decoder-only 多了一整个 Cross-Attention 子层,参数量和计算量都更大。
Decoder-only(GPT / LLaMA / Claude)
只保留 Decoder,去掉 Encoder 和 Cross-Attention。结构是三种里最简单的——每层只有 Masked Self-Attention + FFN,没了。但正是这种极简设计,让它在 Scaling 上碾压了另外两种。
完整的数据流:从文本到概率
一个 Decoder-only 模型的前向传播,数据从输入到输出经过 5 个阶段:
"今天天气真好"
│
▼ ① Tokenizer(分词)
["今天", "天气", "真", "好"] → token IDs: [3421, 1876, 992, 1205]
│
▼ ② Token Embedding + 位置编码
[e₁, e₂, e₃, e₄] → 每个 token 变成 d_model 维向量(如 512 维)
│
▼ ③ N 层 Decoder Block 堆叠(核心)
│
│ ┌─────────────── 每层做两件事 ───────────────┐
│ │ │
│ │ LayerNorm → Masked Self-Attention → 残差 │
│ │ LayerNorm → FFN → 残差 │
│ │ │
│ └────────────── 重复 N 次(如 80 层)──────────┘
│
[h₁, h₂, h₃, h₄] → 每个位置输出一个 d_model 维向量
│
▼ ④ LM Head(语言模型头)
│ 就是一个线性层:W_vocab × h + b
│ 维度:d_model → vocab_size(如 512 → 50,000)
│
[logits₁, logits₂, logits₃, logits₄] → 每个位置得到 50,000 维的原始分数
│
▼ ⑤ Softmax → 概率分布
│
[P₁, P₂, P₃, P₄] → 每个位置得到词表上的概率分布
P₃ = [P("的")=0.02, P("好")=0.85, P("棒")=0.04, ...]LM Head 是什么? 就是一个普通的线性投影层 ( 是词表大小),把 Transformer 输出的 维向量映射到 维,每一维对应词表中一个词的”分数”。经过 Softmax 后变成概率分布。很多模型中 LM Head 的权重和 Token Embedding 矩阵是共享的(weight tying),不额外增加参数。
训练时:Teacher Forcing + 并行
训练时,正确答案序列一次性全部喂入,靠 Causal Mask 防止偷看未来:
输入序列: [BOS] "今天" "天气" "真" "好"
目标序列: "今天" "天气" "真" "好" [EOS]
每个位置的任务:
[BOS] → 预测 "今天" Loss₁ = -log P("今天" | [BOS])
"今天" → 预测 "天气" Loss₂ = -log P("天气" | [BOS], "今天")
"天气" → 预测 "真" Loss₃ = -log P("真" | [BOS], "今天", "天气")
"真" → 预测 "好" Loss₄ = -log P("好" | [BOS], "今天", "天气", "真")
"好" → 预测 [EOS] Loss₅ = -log P([EOS] | ...)
总损失 = (Loss₁ + Loss₂ + Loss₃ + Loss₄ + Loss₅) / 5关键点:5 个位置的预测是同时计算的(一次前向传播),不是一个一个算。Causal Mask 保证位置 3 看不到位置 4 和 5 的信息,所以虽然物理上是并行的,逻辑上等价于一个一个生成。这就是为什么训练比推理快得多——训练是 次前向传播,推理是 次。
推理时:自回归循环
推理时没有”正确答案”可喂,必须一个词一个词地生成:
第 1 步:输入 [BOS]
→ 模型输出 P₁ → 采样得到 "今天"
第 2 步:输入 [BOS, "今天"]
→ 模型输出 P₁, P₂ → 取 P₂ 采样得到 "天气"
第 3 步:输入 [BOS, "今天", "天气"]
→ 模型输出 P₁, P₂, P₃ → 取 P₃ 采样得到 "真"
...直到模型输出 [EOS] 或达到最大长度每一步都要跑一次完整的前向传播。生成 100 个词就要跑 100 次——这就是为什么大模型推理慢(下一篇会讲 KV Cache 怎么加速)。
“采样”是什么? 模型输出的是概率分布 。最简单的做法是取概率最大的词(greedy decoding),但这样生成的文本很呆板。实际中通常用 Top-p(nucleus sampling) 或 Temperature 控制随机性——Temperature 越高,生成越”有创意”(也越可能说胡话)。
训练 vs 推理:关键差异
| 训练 | 推理 | |
|---|---|---|
| 输入 | 完整序列(Teacher Forcing) | 逐步追加(自回归) |
| 前向传播次数 | 1 次(并行处理所有位置) | n 次(每生成一个词一次) |
| Causal Mask | 用来模拟”看不到未来” | 自然满足(未来的词还没生成) |
| 目标 | 最小化损失,更新权重 | 生成下一个词,不更新权重 |
| 速度 | 快(GPU 并行) | 慢(串行生成) |
注意力矩阵可视化
"今天" "天气" "真" "好"
"今天" ✅ ✗ ✗ ✗ ← 只能看自己
"天气" ✅ ✅ ✗ ✗ ← 能看到 1 个上文
"真" ✅ ✅ ✅ ✗ ← 能看到 2 个上文
"好" ✅ ✅ ✅ ✅ ← 能看到所有上文每层结构:
Decoder-only 每层(Pre-Norm 风格):
输入 → LayerNorm → Masked Self-Attention → 残差 → LayerNorm → FFN → 残差 → 输出和前两种架构的结构对比:
| Encoder-only (BERT) | Encoder-Decoder (T5) | Decoder-only (GPT) | |
|---|---|---|---|
| 每层组件 | Self-Attn + FFN | Self-Attn + Cross-Attn + FFN(Decoder 侧) | Masked Self-Attn + FFN |
| 注意力方向 | 双向 | Encoder 双向 / Decoder 单向 | 单向(Causal Mask) |
| 训练信号 | 仅 [MASK] 位置(~15%) | 仅 Decoder 生成的 token | 每个位置(100%) |
| 训练方式 | MLM(完形填空) | Span Corruption(填空生成) | 自回归(预测下一个词) |
| 生成能力 | ✗ 不擅长 | ✅ 可以 | ✅ 最擅长 |
为什么 Decoder-only 胜出?
原因一:任务统一性
所有任务都可以转化为”预测下一个词”:
翻译: "Translate to English: 我爱北京 → I love Beijing"
摘要: "Summarize: <长文> → <摘要>"
问答: "Question: 天空为什么是蓝色的?\nAnswer: 因为瑞利散射..."
代码: "Write a Python function to sort a list:\ndef sort_list(lst):\n ..."不需要为每种任务设计不同的架构——一种架构,一种训练方式,解决所有问题。
原因二:训练效率
前面我们已经看到,Decoder-only 在每个位置都有预测目标,一个长度为 的序列产生 个训练信号——数据利用率 100%。对比 BERT 的 MLM 只有 15% 的位置提供训练信号,Decoder-only 的数据利用效率高出数倍。
原因三:Scaling Law
研究发现,Decoder-only 架构在参数量增长时性能提升最平滑、最可预测。OpenAI 的 Scaling Law 论文正是基于 Decoder-only 架构做的实验。
一句话总结:Decoder-only 架构用最简单的结构(Self-Attention + FFN)和最统一的训练方式(预测下一个词),在 Scaling Law 的加持下,通过暴力堆参数实现了通用智能。简单,就是力量。
Encoder-only 和 Encoder-Decoder 并没有”错”
BERT 在小模型、理解类任务上仍然是最优选择(比如搜索排序、文本分类)。T5 在翻译等结构化任务上有天然优势。
但当你想造一个通用的、超大规模的语言模型时,Decoder-only 是唯一经过验证的路径。
小结
本篇拆解了 Transformer 的”砖与瓦”——那些看似简单、却撑起整座大厦的关键组件:
-
残差连接:。通过捷径让梯度绕过每一层直达底层,用 打破连乘的指数效应,解决梯度消失/爆炸问题。
-
LayerNorm:对每个词的所有维度做归一化,消除权重矩阵尺度不一和残差累积造成的数值差异。Pre-Norm 比 Post-Norm 训练更稳定,是现代大模型标配。
-
FFN:“升维→非线性→降维”,占 Transformer 约 67% 的参数。激活函数从 ReLU(硬截断)→ GELU(平滑过渡)→ SwiGLU(门控机制),逐代增强表达能力。
-
Causal Mask:下三角掩码,训练时通过 Teacher Forcing 并行计算所有位置,推理时自回归逐词生成。模型学到的是 的概率分布。
-
三种架构:Encoder-only(BERT,双向 MLM)、Encoder-Decoder(T5,Cross-Attention + Span Corruption)、Decoder-only(GPT,单向自回归)。Decoder-only 凭借任务统一性、100% 训练信号密度和优秀的 Scaling Law 成为主流。
下一篇(最终篇),我们将从训练走向推理——损失函数如何驱动模型学习、KV Cache 如何加速推理、MQA/GQA 如何压缩显存、Flash Attention 如何突破 的显存瓶颈。
本系列参考:The Illustrated Transformer by Jay Alammar(CC BY-NC-SA 4.0),Deep Residual Learning for Image Recognition by He et al.
💬 评论
评论加载中...